




Товар |
Параметры |
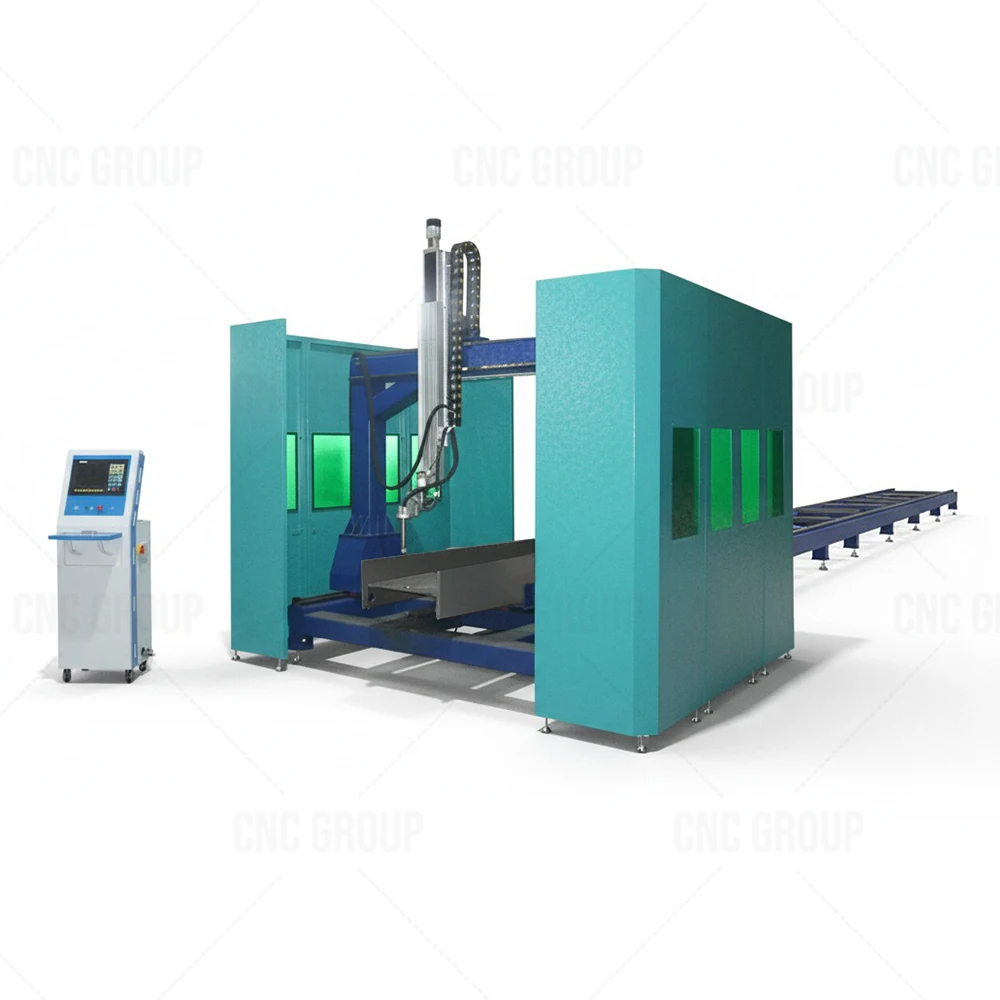
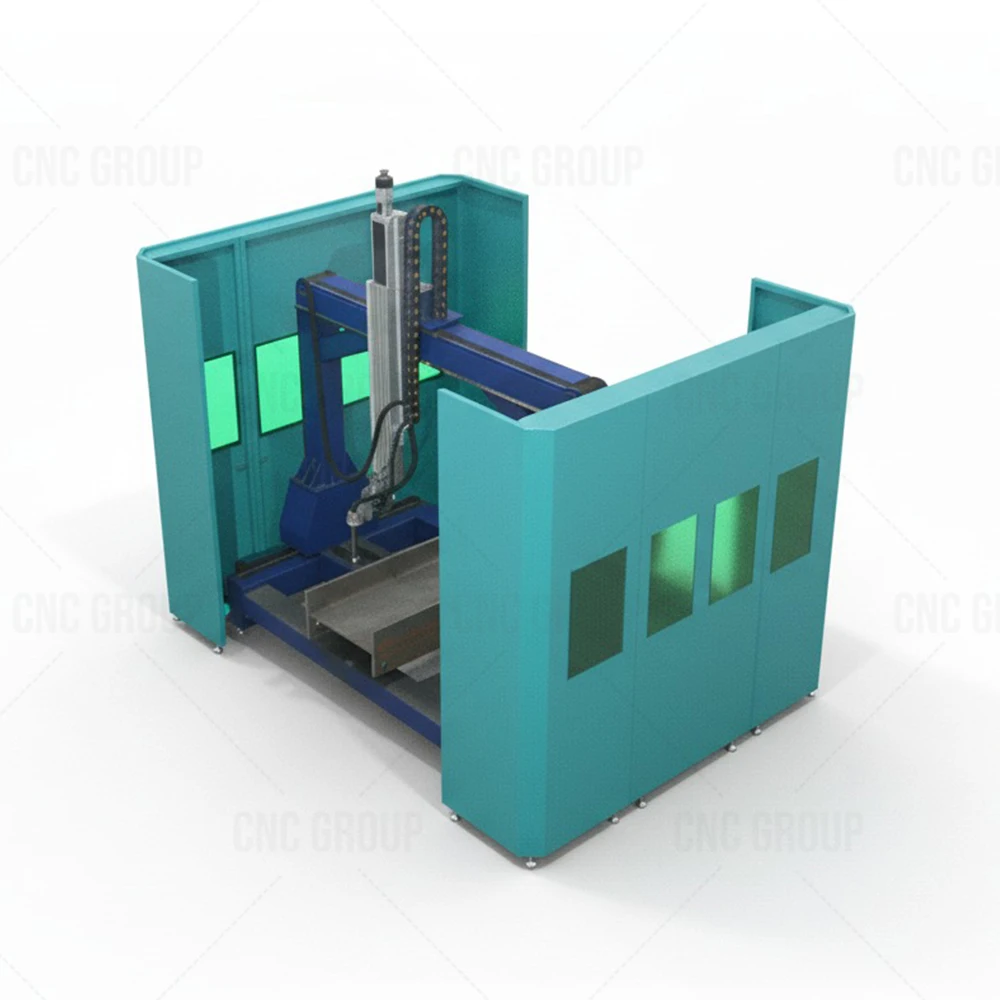
Стальная балка Н-образная, швеллер, стальной уголок |
Высота стенки: 100 мм - 600 мм Ширина полки: < 400 мм Способ резки
|
плазменная толщина резки |
зависит от мощности плазменного источника питания |
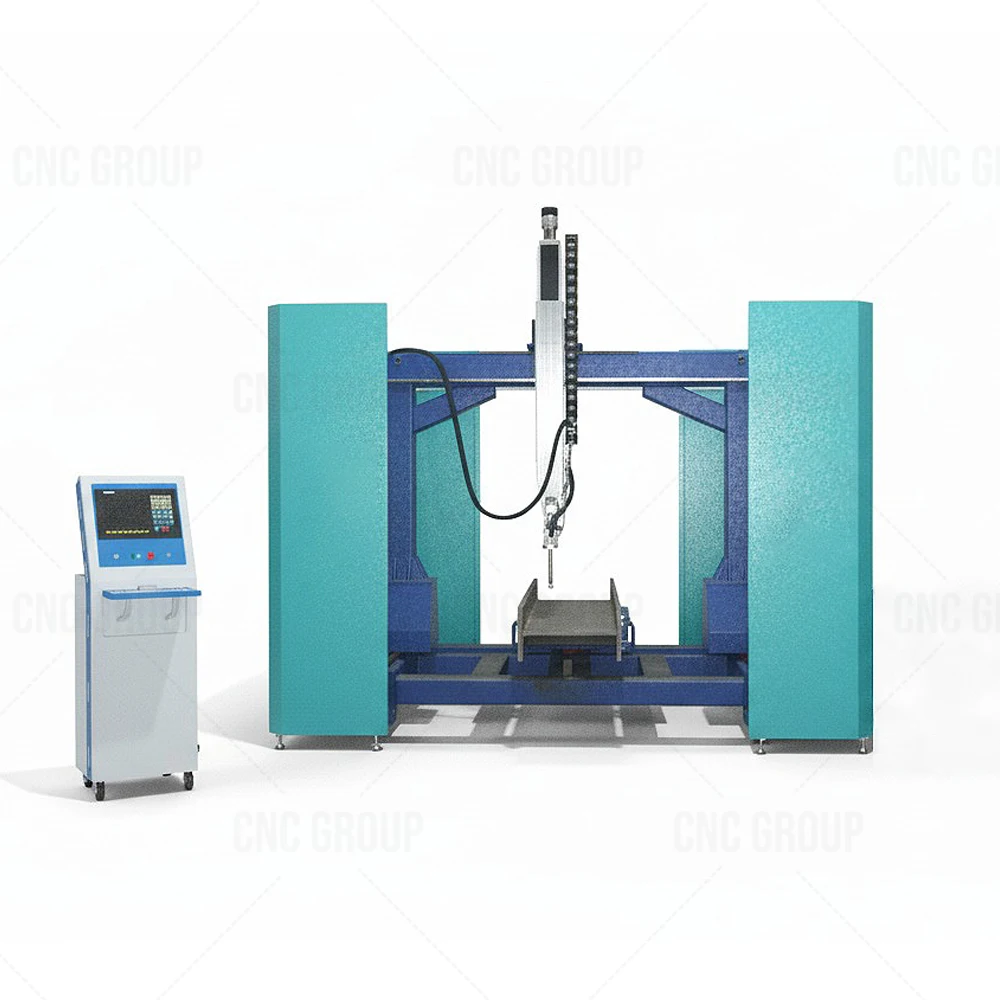
Длина резки |
12000 мм Точность длины резки ±1,5 мм |
Скорость резки |
10 - 2000 мм/мин |
Скорость перемещения |
10 - 6000 мм/мин |
Остаточная резка |
500-600мм |
Нагрузка |
2000 кг |
Форма резки деталей |
Сквозное отверстие, резка под прямым углом, резка под наклоном, резка с торцевым выступом |
Точность резки стандарт |
ISO9013-2002/ISO8206-1991/JB T10045.4-1999JB |







Название детали |
Характеристики |
количество |
Режим работы |
7 осей, 5 связей |
|
6-осевая система управления для профильного станка |
6-осевая система управления |
1сет |
Дистанционное управление |
дистанционное управление |
1 комплект |
Серводвигатель подачи, драйвер |
750Вт |
2 комплекта |
Сервомотор, драйвер |
400Вт |
3 комплекта |
Сервомотор, драйвер |
200W |
1 комплект |
Планетарный редуктор |
Humphrey |
6 комплектов направляющих |
устройство |
1 комплект |
|
Автоматическое устройство подачи |
1 комплект |
|
Гидравлическое зажимное устройство |
2 комплекта |
|
Устройство бокового перемещения |
1 комплект |
|
Вертикальный вал горелки |
1 комплект |
|
Устройство вращения головки |
1 комплект |
|
Устройство приема материала |
1 комплект |
|
Гидравлический масляный насос |
1 комплект |
|
Количество гидроцилиндров |
2 комплекта |
|
Программно |
Системный шкаф |
Дополнительное программное обеспечение для автономного программирования |
метод резки |
Плазма |

Коллаборативный палетизирующий робот рукой 6-осной полезной нагрузкой 30 кг высокоточный многофункциональный палетизирующий робот рукой

Переносная портативная лазерная режущая машина с ЧПУ двойной трассовой приводом трехосяной дизайн может резать изысканные узоры компьютер прямой работы

LGK-63/100/120/160IGBT Инвертор источник питания для резки воздушной плазмы

Хороший помощник Лучший продавец высокое качество хорошая цена Горячий продукт высокое качество хорошая цена 6-осевой робот рукой робот используется для передачи





