




Elementum |
Morbi laoreet |
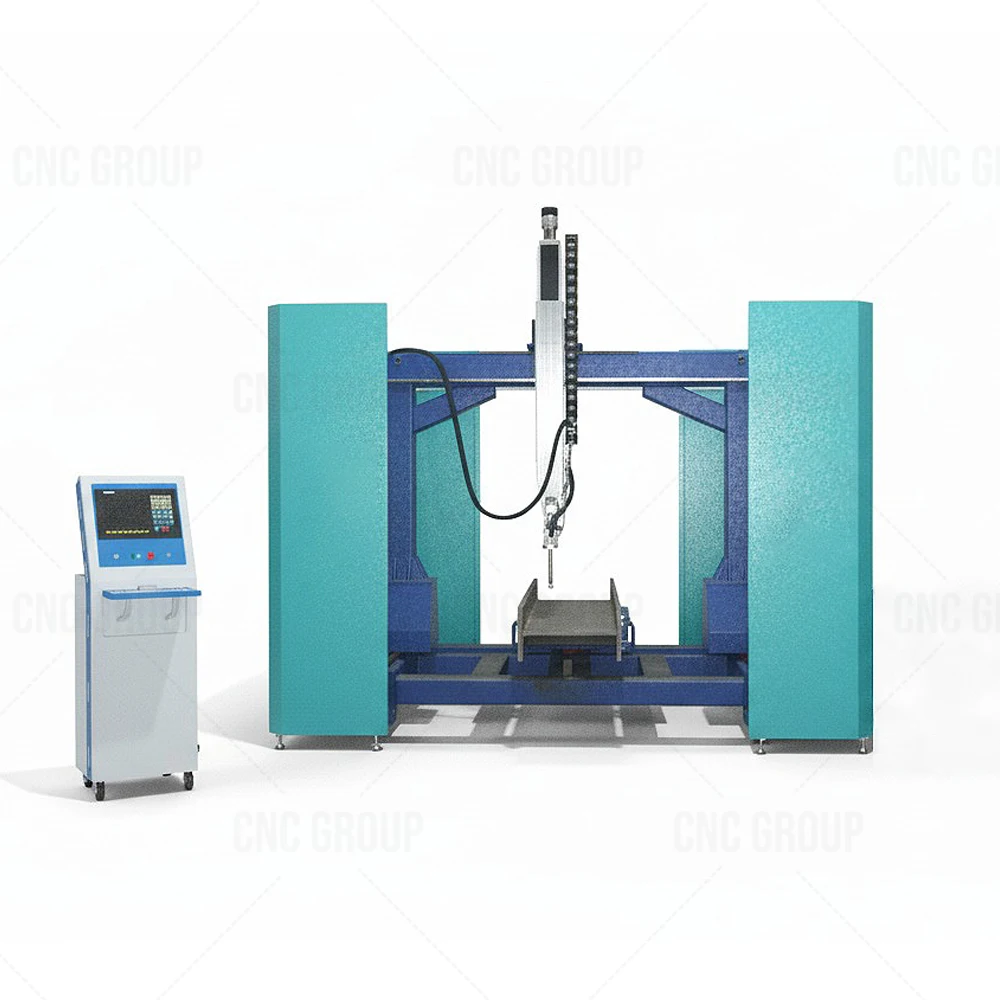
Ferrum formae H, ferrum I-beam, ferrum canali, ferrum angulare |
Altitudo web: 100mm-600mm Latitudo flange: < 400mm Methodus sectionis
|
spissitudo secandi plasma |
pendet a potestate plasmati |
Secans longitudinem |
12000mm, Praecisio sectionis ±1.5mm |
Celeritas incisionis |
10 - 2000mm/min |
Velocitas movendi |
10 - 6000 mm/min |
Cauda secans |
500-600mm |
Load |
2000kg |
Forma sectionis secantis |
Foraminatio, sectio directa ad longitudinem, sectio obliqua ad longitudinem et spigot terminale |
Praecisio sectionis standardus |
ISO9013-2002/ISO8206-1991/JB T10045.4-1999JB |







Pars Nomen |
Specificationes |
numerus |
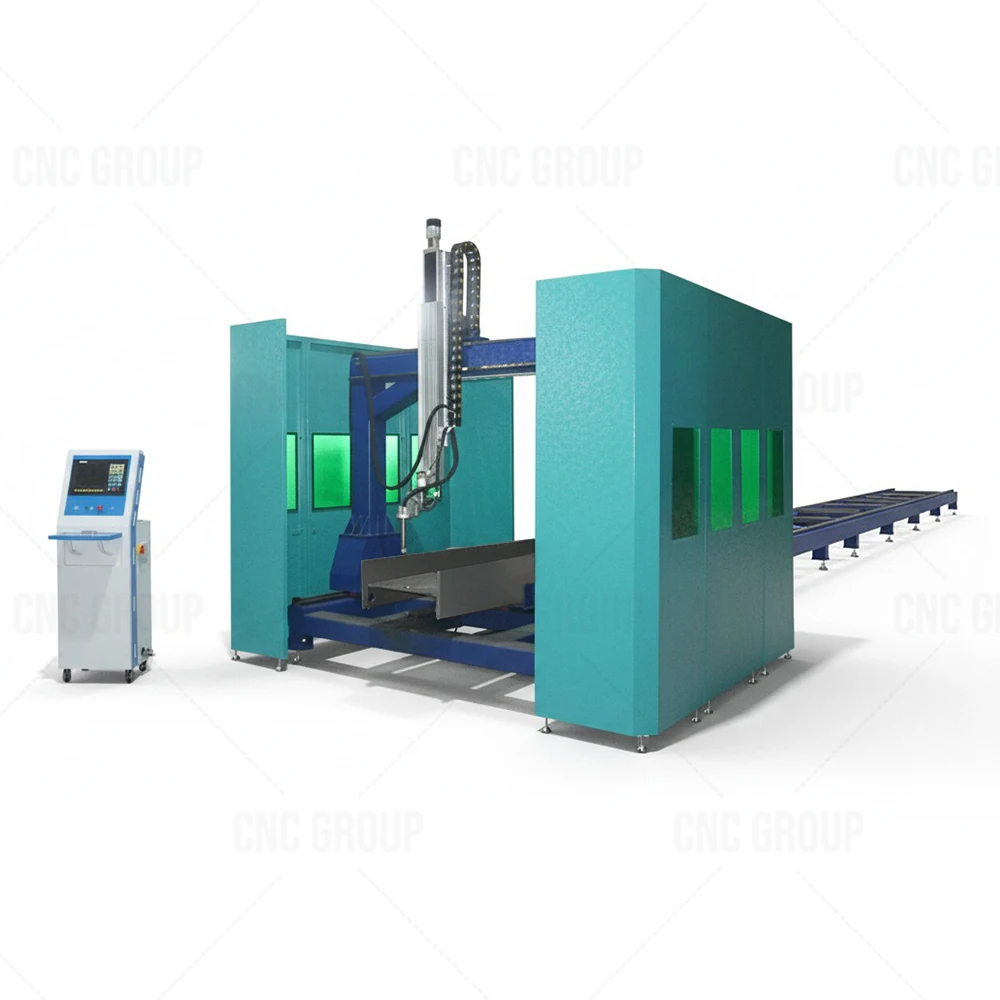
Modus Operandi |
7 axes 5 articulationes |
|
systema controlle 6-axiale pro ferro sectionali |
systema controlle 6-axis |
1set |
Remotum imperium |
remotum imperium |
1 Set |
Motor servo cibandi, dux |
750W |
2 Setis |
Motor servo, dux |
400W |
3 sets |
Motor servo, dux |
200W |
1 Set |
Reductor planetarius |
Humphrey |
6 series ductorum |
machina |
1 Set |
|
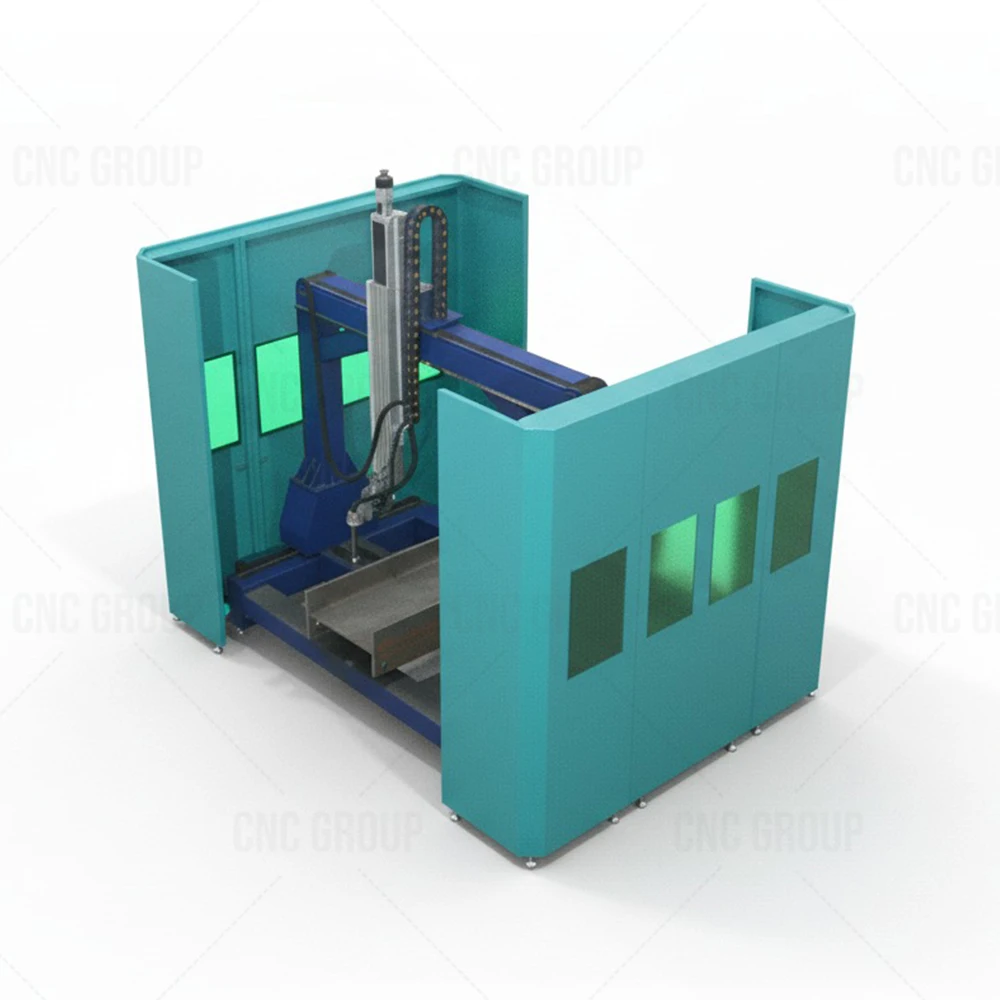
Apparatus cibandi automaticus |
1 Set |
|
Apparatus tenendi hydraulicus |
2 Setis |
|
Apparatus movendi lateralem |
1 Set |
|
Axis tollendi longitudinalis taedae |
1 Set |
|
Apparatus rotandi capitis machinae |
1 Set |
|
Apparatus materiae recipienda |
1 Set |
|
Pompa olei hydraulici |
1 Set |
|
Numerus cylindrorum hydraulicae |
2 Setis |
|
Programmatice |
Atrium systematis |
Software programmationis offline optionale |
secans Methodo |
Plasma |

Collaborative Palletizing Robot Brachium VI-axis Payload 30kg praecisionem Multi munus Palletizing robot brachium

Portable gantry CNC laser secans machinam dual-track coegi tres-axi design possunt secare exquisita exemplaria computatrum directa operandi

LGK-63/100/120/160IGBT Inverter aeris plasmae secans potentia fons

Bonus adiutrix optimus vendit high quality price Hot product high quality good price 6 axis robot brachium robot usus ad tradendum





